
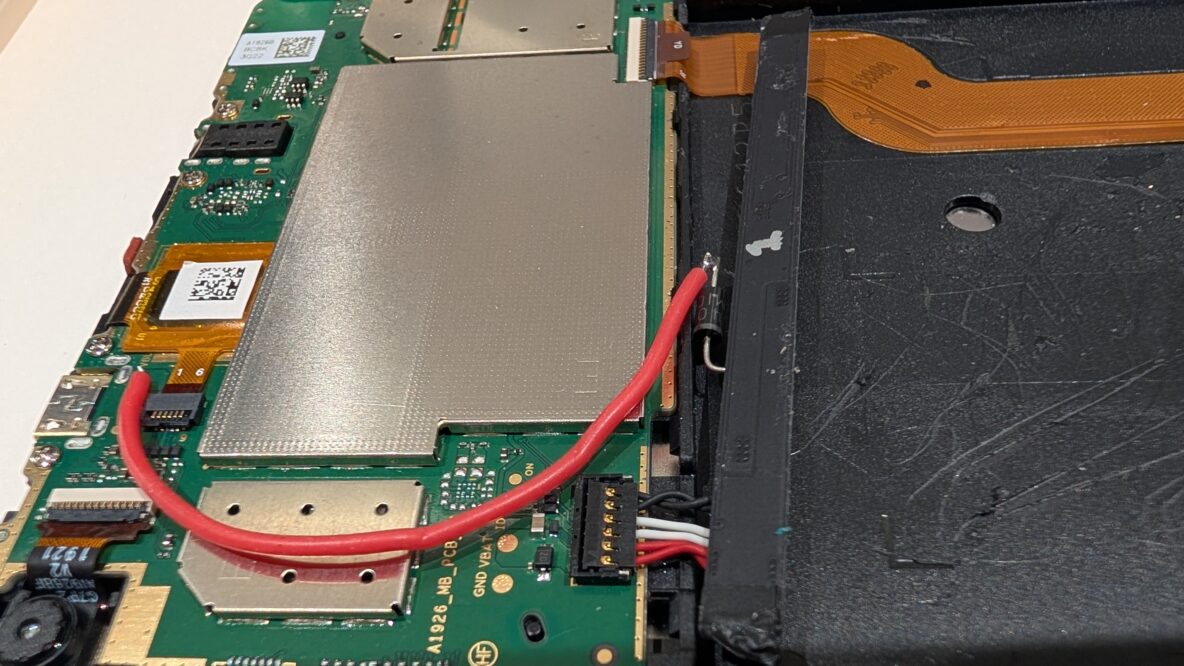
Amazon Fire 7 tablets, used for home automation, can develop swollen batteries when permanently charging. But they won’t boot without a battery so I adopted a modified approach based on a Great Scott YouTube video.
A Wordy Watch

Creating a Watch which tells the time in words. Inspired by QLockTwo – tells the time in military “crossword” format.

Electronic Jewelry Power Design
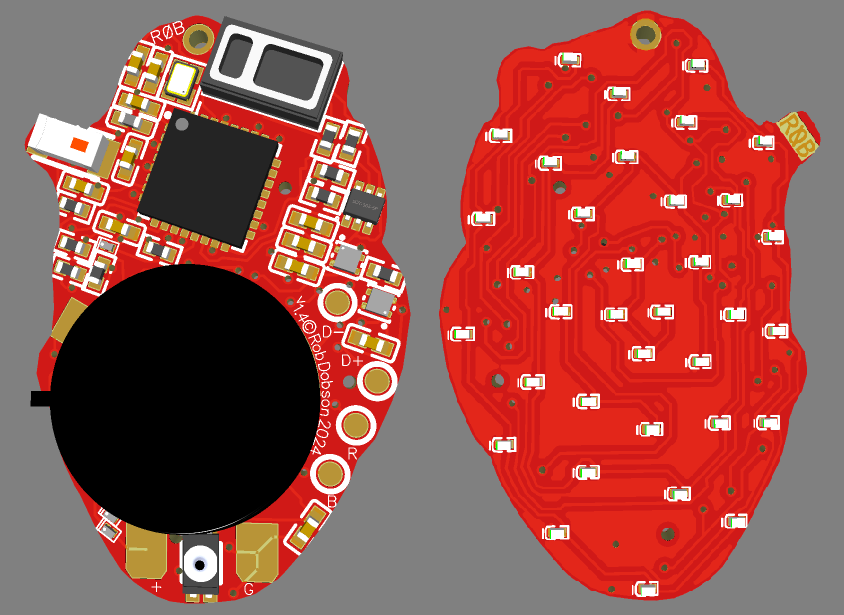
For my son’s Christmas present last year I made him a pair of heart-rate monitoring earrings with pulsing LED display in the form of a human heart. They can also be used as a BLE heart-rate monitor. From a design perspective they focus on power management and battery life. They have received a lot of complients and some enquiries about availability for purchase.
Program a Connected Device using Raft, Part 5
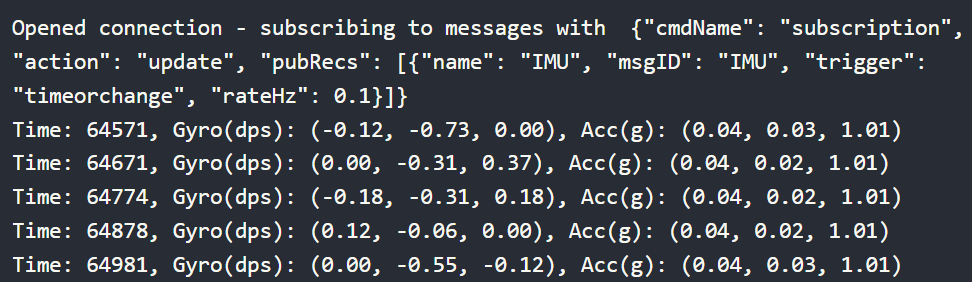
In the latest post of this series we look closely at the publish-subscribe (pubsub) mechanism built into Raft and use it to publish data from our Inertial Measurement Unit (IMU)
Program a Connected Device using Raft, Part 4

Continuing with the series on developing a connected device using Raft, we now add support from an I2C IMU.
Program a Connected Device Using Raft, Part 3
The next installment of creating a connected app using Raft. This time we start to add functionality to control an LED ring.
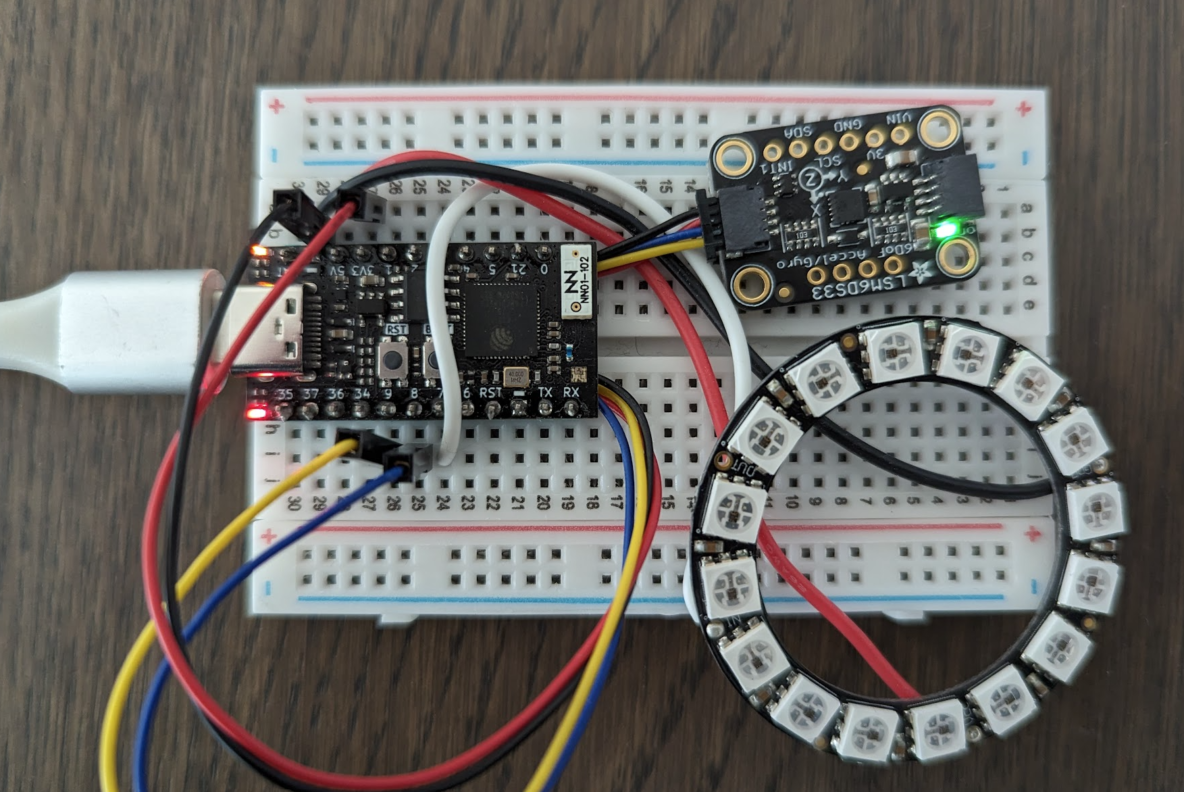
Program a Connected Device Using Raft, Part 2
Using the Raft framework to program a connected device with BLE, WiFi and Serial comms. Publishing data from accelerometers and other sensors and displaying information on addressable LEDs.
Program a Connected Device Using Raft, Part 1
This is the first part in a series where I create firmware for a connected device using the Raft framework. Raft makes it simple to develop apps conntected via BLE, WiFi or serial and featuring publish-subscribe, web server, automated device detection and REST APIs.
A Novel Heart-Rate algorithm with Phase-Locked Loop
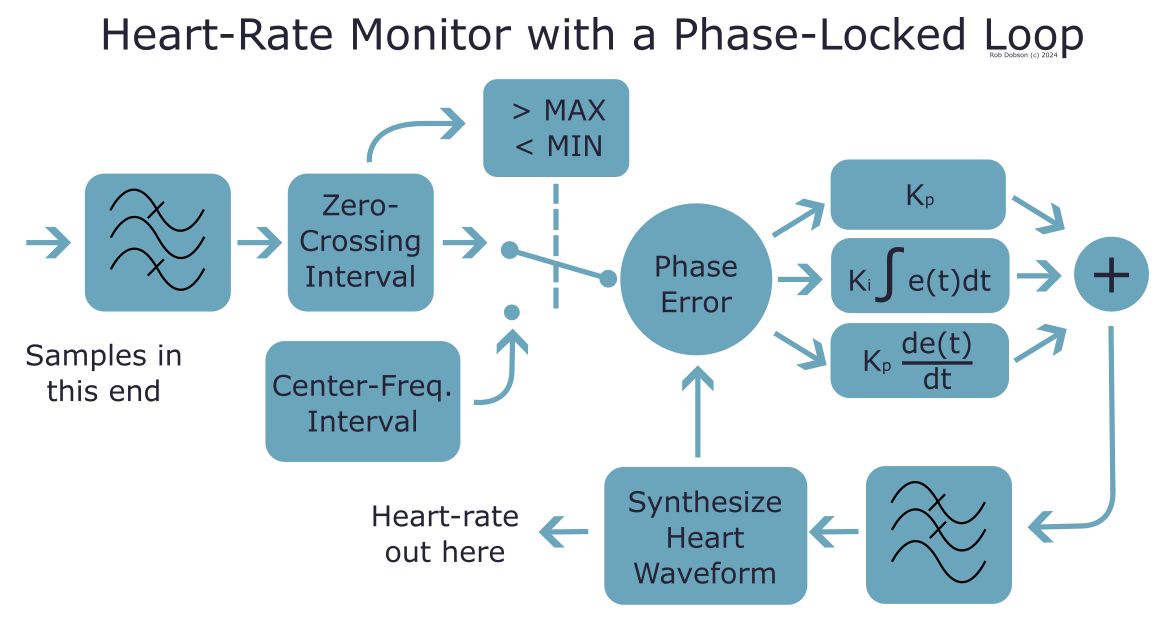
I’ve found that adding a Phase-Locked Loop to a simple Heart-Rate Monitoring algorithm makes it more suitable for noisy environments and low-power applications including electronic jewelry.