

Squeezing a larger module onto the control board for Marty the Robot V2.
Installing ESP-IDF on WSL2
I find that the Espressif ESP32 documentation for installing their IDF development toolchain doesn’t work for me on WSL2 without a few mods …
Marty Sounds – Convert Sounds for Marty (and RIC)
Converting sound files to use on Marty the Robot – and RIC, its control board
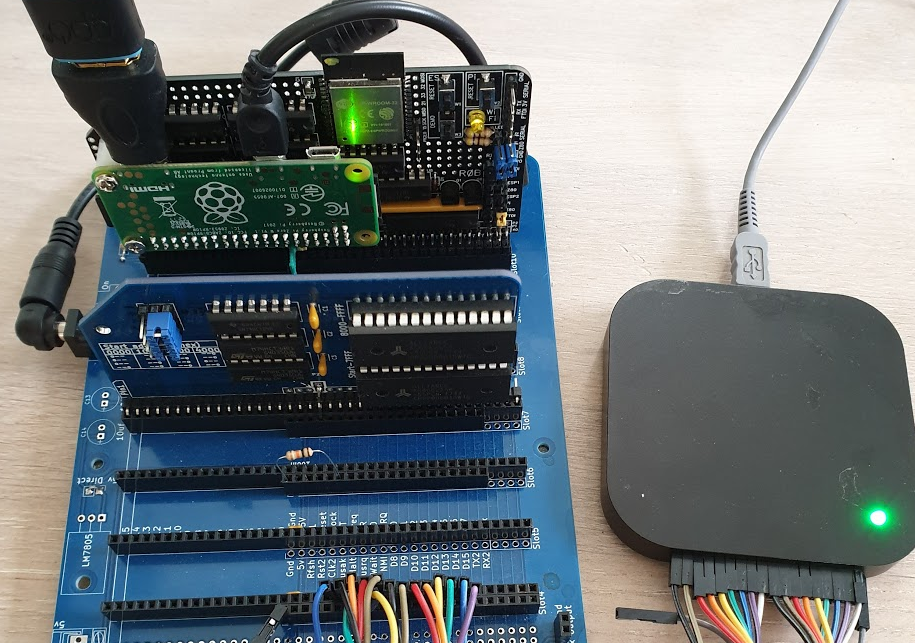
Pushing Z80 to the Limits
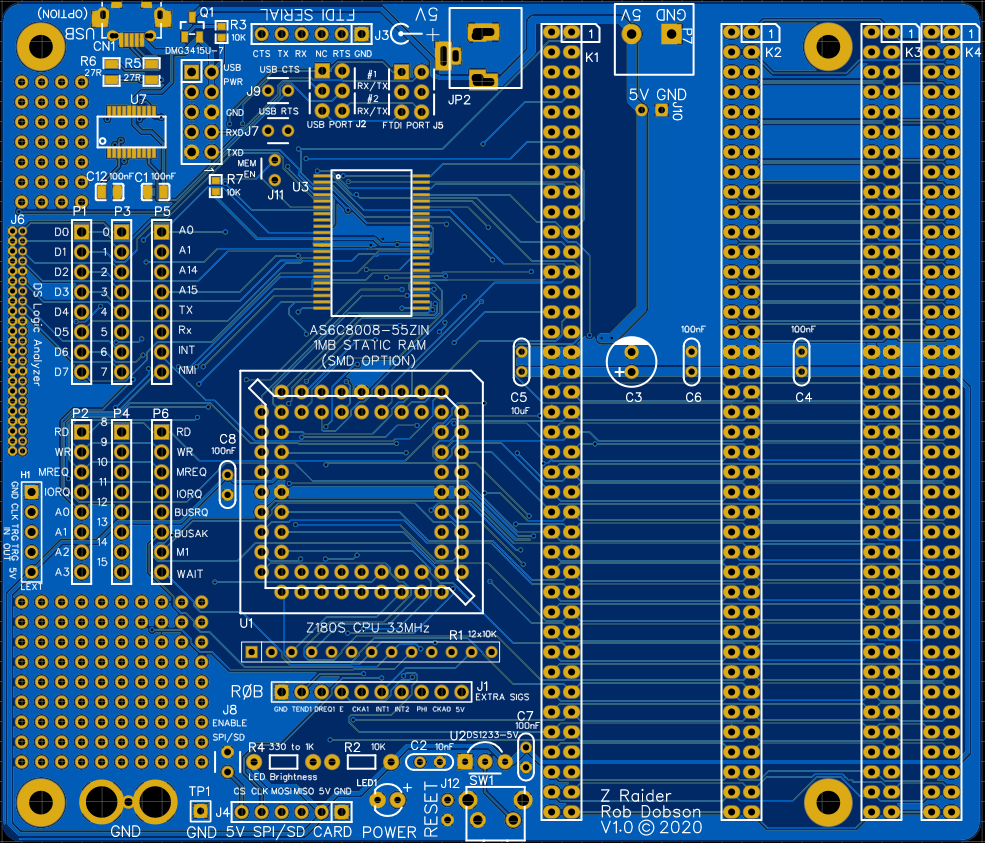
Asked enough times how to modify RC2014 processor boards to use all the BusRaider features I decided it was time to build one that works out of the box. With a few more goodies thrown in.
Introducing the Stepper Hat Trio
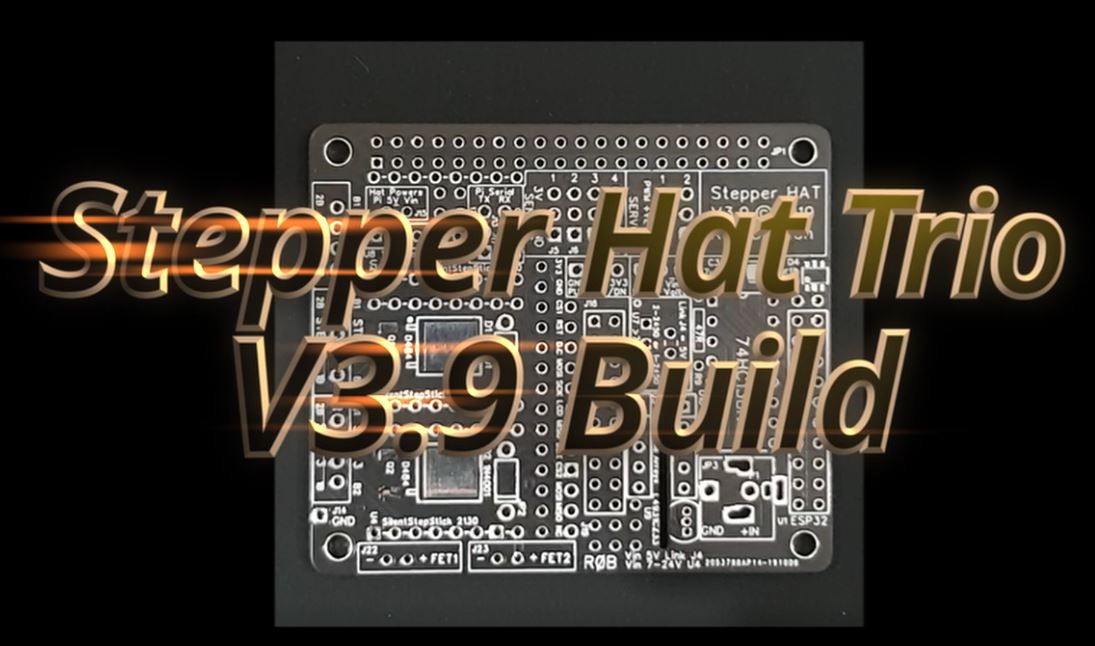
A new board for driving up to three stepper motors, WiFi connected with a web-server UI for CNC or dedicated applications. Based on the Raspberry Pi HAT format and also allowing control from a Pi,
Z180 50MHz with the BusRaider
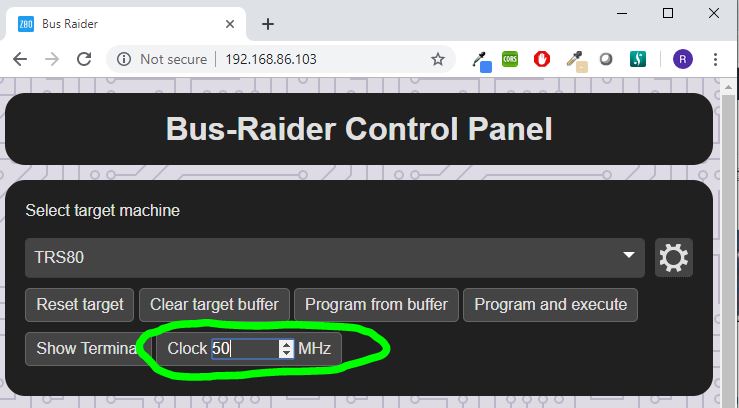
How fast can a Z180 be made to run in an RC2014 backplane? Let’s find out!
Marty Learns to Swing – Part 3 Q-Learning
The third part in the Marty Learns to Swing series. This time out Marty pursues Q-Learning but finds that an Exhaustive approach suits him better.
Marty Learns to Swing – Part 2
In this, the second part of the series, I develop an OpenAI Gym to model Marty the Robot on a swing and get it to the point where we can start testing strategies for keeping Marty swinging once he gets started.
Marty Learns To Swing – Part 1
Marty is an amazing walking robot designed by Sandy Enoch and the Robotical team. Here we’re starting the process of teaching Marty how to use a playground swing.
What can you do with an RC2014 (+ BusRaider)? Part 1
Someone on the RC2014 forums asked “What can you do with an RC2014”. I decided to answer, perhaps somewhat tangentially, with a post about developing RC2014 hardware.