
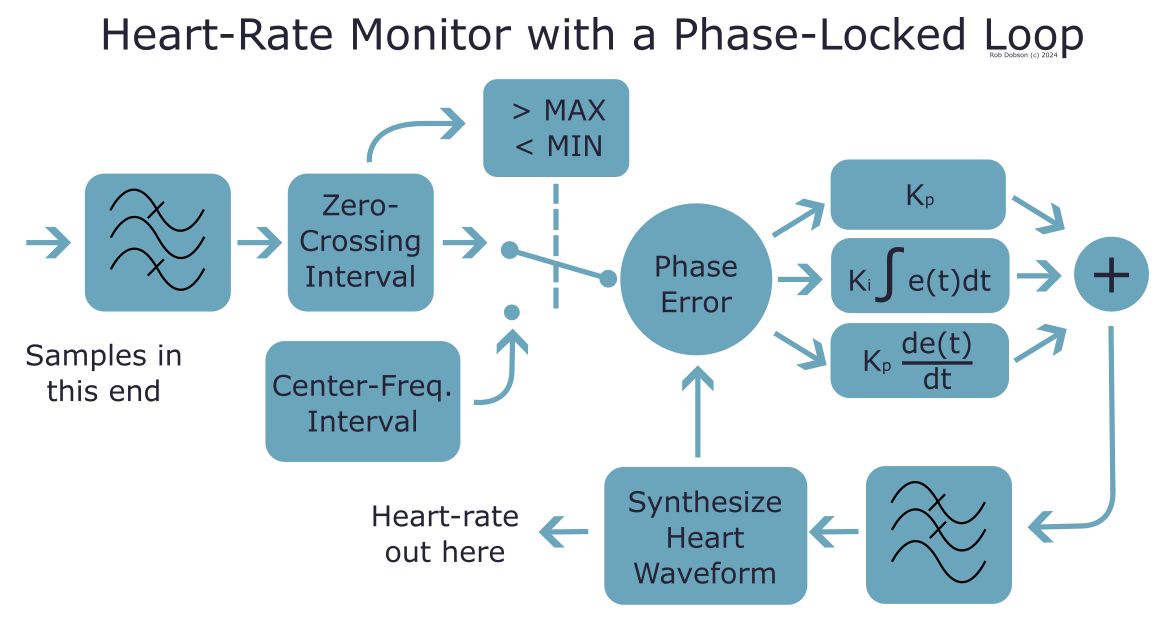
I’ve found that adding a Phase-Locked Loop to a simple Heart-Rate Monitoring algorithm makes it more suitable for noisy environments and low-power applications including electronic jewelry.
Auto Code Creation for I2C Devices
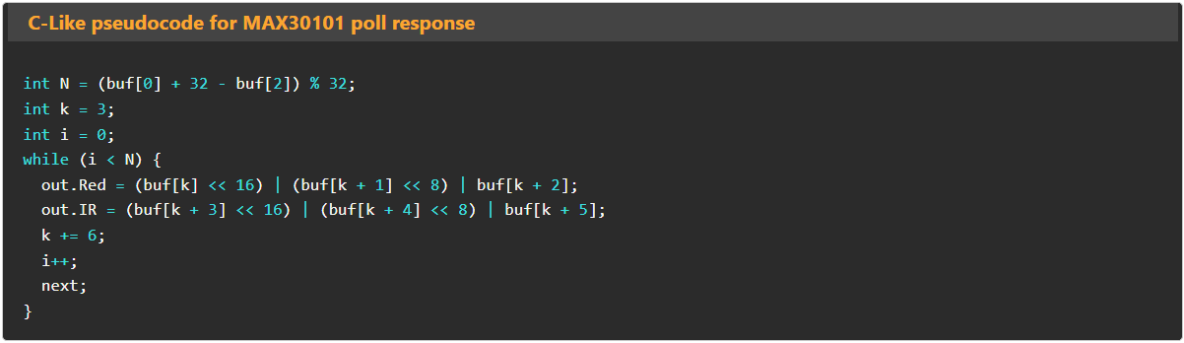
I’m spending a bit of time in NYC Soho and enjoying messing around with I2C breakout boards, some of which are made by Adafruit only a few hundred yards from here. This post is about auto-generation of code for decoding I2C poll responses.
I2C Auto Identification
Simplify embedded development by auto-identifying I2C devices and have them send you their data at a rate you choose.
Hybrid Super-Caps – power for electronic jewelry?

Are Hybrid Super-Capacitors a good option for powering electronic jewelry. In attempting to find out I realised how little I know about the chemistry of these devices and how odd their behaviour is compared to plain old super capacitors – or LiPo batteries for that matter!
Is ArduinoJson Pointless?
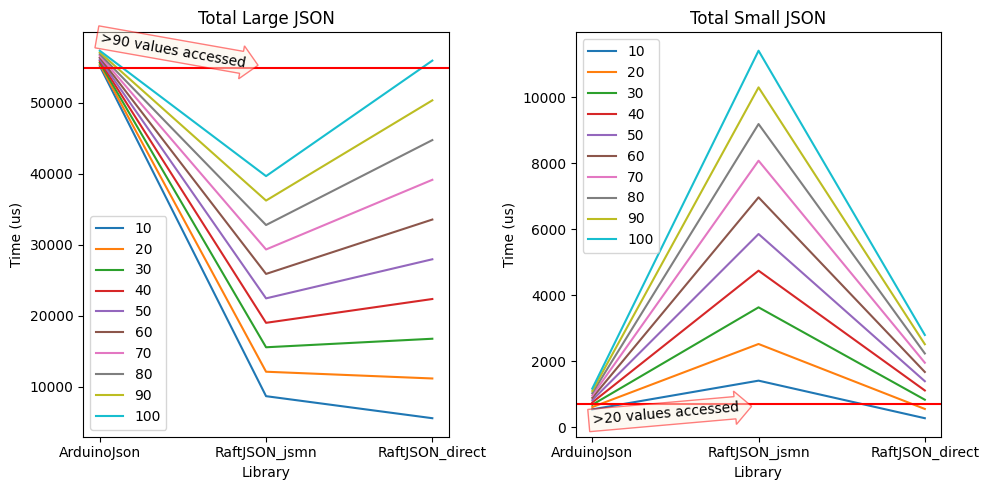
Extracting values from JSON using ArduinoJson almost-always** takes many times longer and consumes many times more memory than just parsing the JSON “on-demand” every time you want to extract a value. RaftJson is an on-demand parser which is many times quicker than ArduinoJson in most real-world uses.
Investigating ESP32-C3 Power Management
While developing some electronic Jewelry I have measured the power consumption of the ESP32-C3 microcontroller to see if it might be a good fit for my needs.
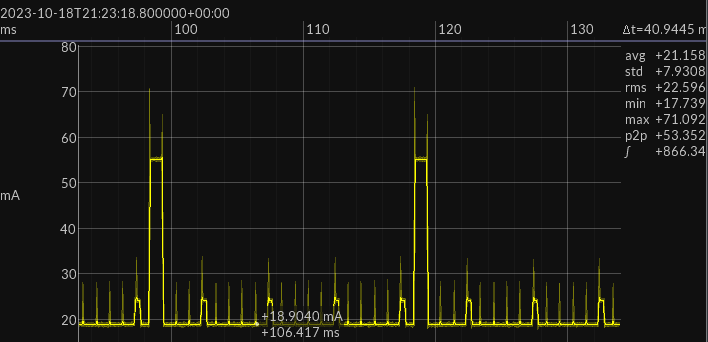
BLE performance analysis with pyshark
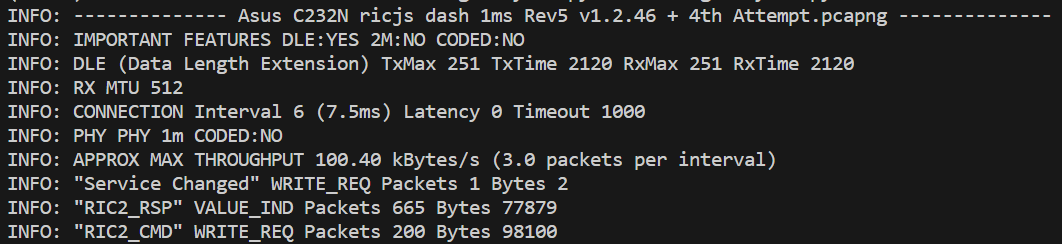
Debugging BLE communication is simplified with this set of analysis tools for captured BLE packets.
Scader Lights Up Many Circuits
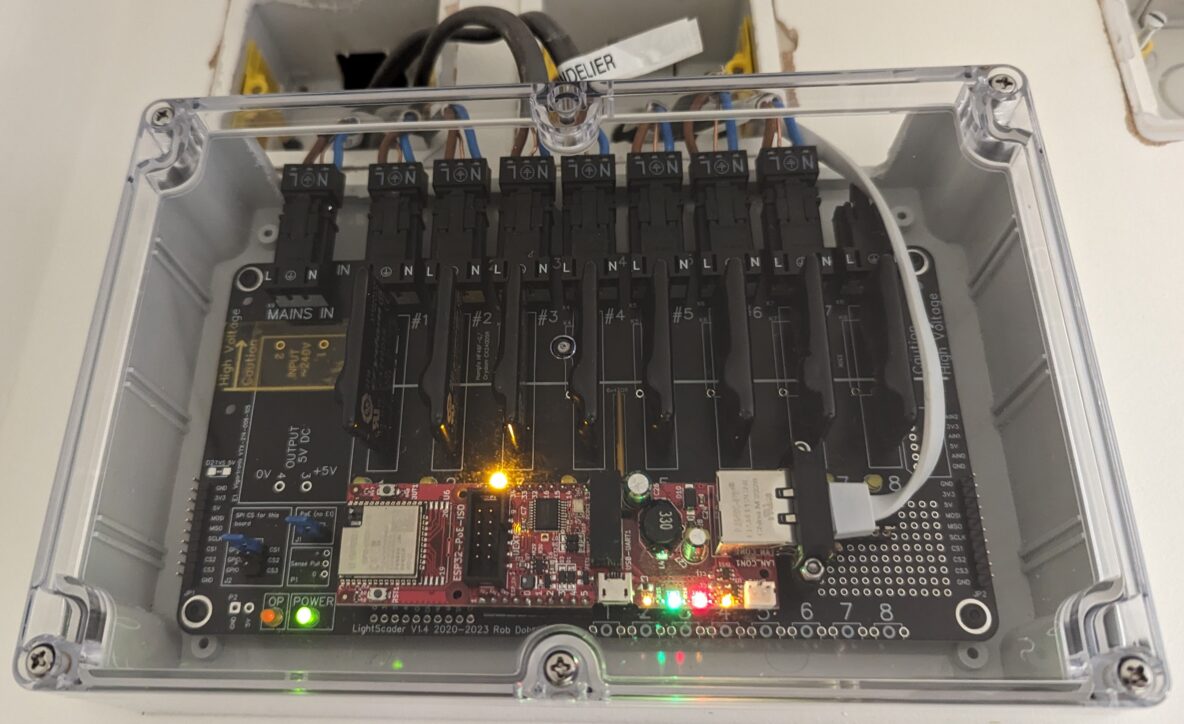
Banish wireless lighting systems with a cascadable lighting controller using Solid-State Relays and wired communication.
Automate Everything for NPM Packages
Automate all aspects of publishing a package to NPM
Use the Factory Pattern to Untangle your Code
The Factory pattern is a powerful way to decouple parts of your app. Unfortunately a lot of tutorials on this pattern miss the point about decoupling and have a switch statement in the factory to generate each object. This negates the benefit of the factory in my opinion so here’s a tutorial with full abstraction.